Ubiros 메뉴얼 * Ubiros의 메뉴얼 입니다. 

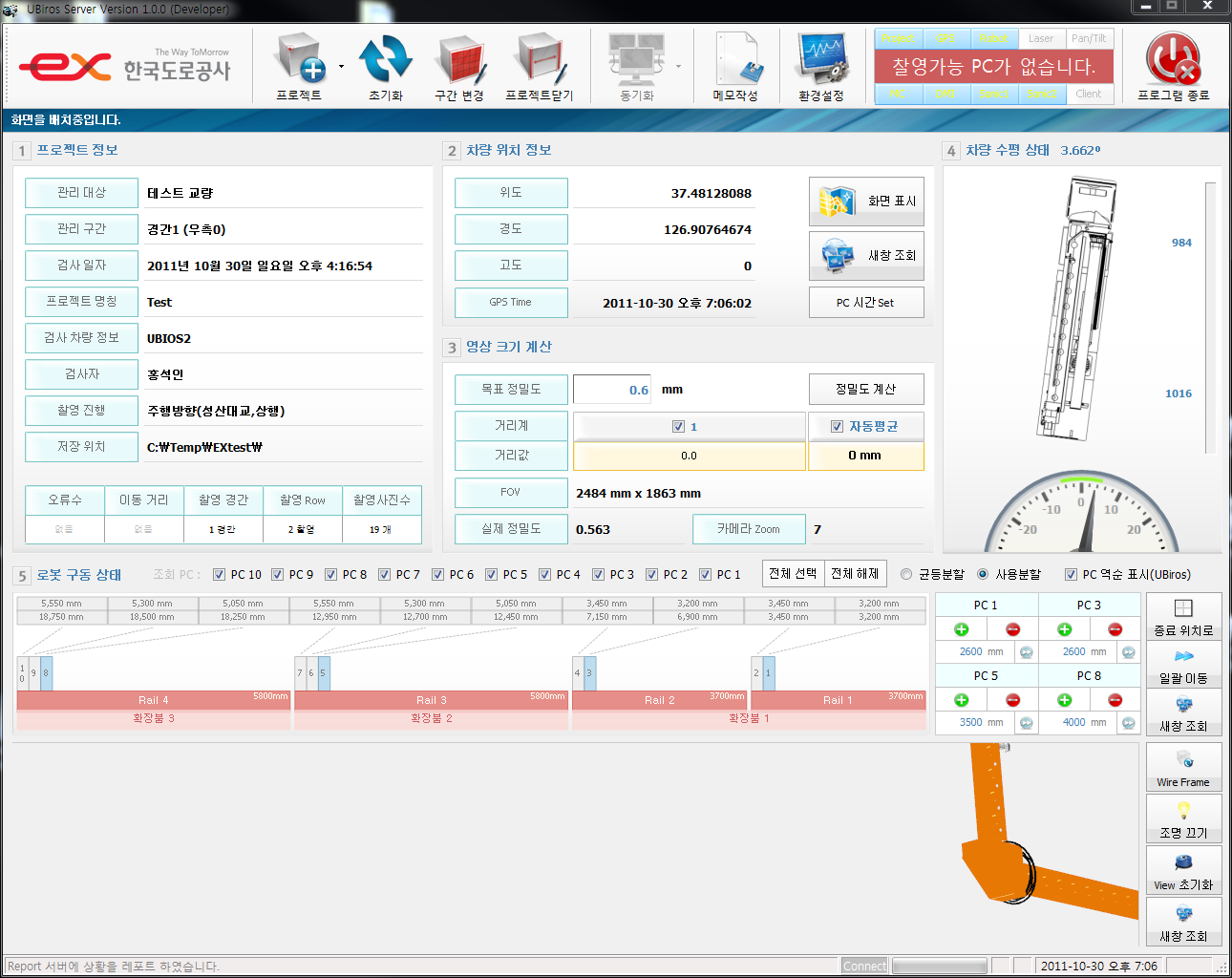
1. 메인 화면 구성 1-1 메인 화면 1 - 프로젝트 및 각종 하드웨어를 제어합니다. 




 프로젝트 프로젝트
① 신규프로젝트 생성
- 관리대상 / 프로젝트명칭 / 검사자 / 검사시작일자 입력 후 저장위치를 설정 합니다. 
② 프로젝트 정보 변경
- 현재 열려있는 프로젝트 정보를 변경합니다.
- 관리대상 / 프로젝트명칭 / 검사자만 변경이 가능합니다.
③ 기존 프로젝트 열기
- 신규 프로젝트를 생성한 폴더를 선택하여 프로젝트를 불러옵니다.
④ 프로젝트 정보
- 불러온 프로젝트의 자세한 정보를 표시합니다.

* 경간관리/변경

* 경간추가
- 경간번호를 지정합니다. 추가시 순서대로 번호가 증가합니다.
- 경간 길이 : 경간의 길이를 입력합니다.
- 경간 방향 : 상행 / 하행 방향을 설정합니다.
- 찰영 방향 : 정방향 및 역항뱡 찰영 합니다.(경간 방향과 같은 쪽은 정방향 / 다른 쪽은 역방향)

*경간삭제
- 선택한 경간을 삭제합니다.
* 경간변경
- 선택한 경간으로 작업 경간을 변경합니다.
* 닫기
- 경간관리 / 변경창을 종료합니다.
* 해당 경간을 더블클릭 하여 수정 가능 합니다.
초기화
- 현재 경간 초기화 : 현재 작업하고 있는 경간의 이미지를 삭제 합니다.
- 프로젝트 전체 초기화 : 전체 프로젝트의 이미지를 삭제합니다. 프로젝트 닫기
- 현재 열려있는 프로젝트를 닫습니다. 메모 작성
- 프로젝트에 관련한 내용을 메모하여 저장합니다.
- 초기화 버튼 클릭시 모든 내용이 지워집니다.
- 편집도구를 이용하여 메모를 보다 효과적으로 작업할 수 있습니다.
- 각 경간별로 메모할 수 있습니다. 
환경 설정
- Keep Alive를 설정합니다.
- 하드웨어 장비를 설정합니다.
- 설정 초기화시 마지막에 저장된 상태도 설정합니다. 
차량 위치 정보
- GPS값을 수집하여 표시해줍니다.
- 화면표시 : 현재 Ubiros의 위치를 구글맵을 연동하여 표시합니다.
- 새 창표시 : 새 창의 띄워 구글맵에 표시합니다.
- PC 시간 Set : GPS시간을 이용하여 각 클라이언트 PC의 시간을 동기화 시킵니다. 
영상 크기 계산
- 필요한 레이저 값을 취득하여 자동 평균값과 목표정밀도에 입력값을 입력 후 정밀도 계산 클릭하여 FOV를 계산합니다. 
- 자동 평균 체크를 해제하여 수동입력하여 FOV 를 계산합니다. 
차량 수평 상태
- 두 개의 초음파센서를 이용하여 차량의 수평상태를 이미지로 표시합니다. 
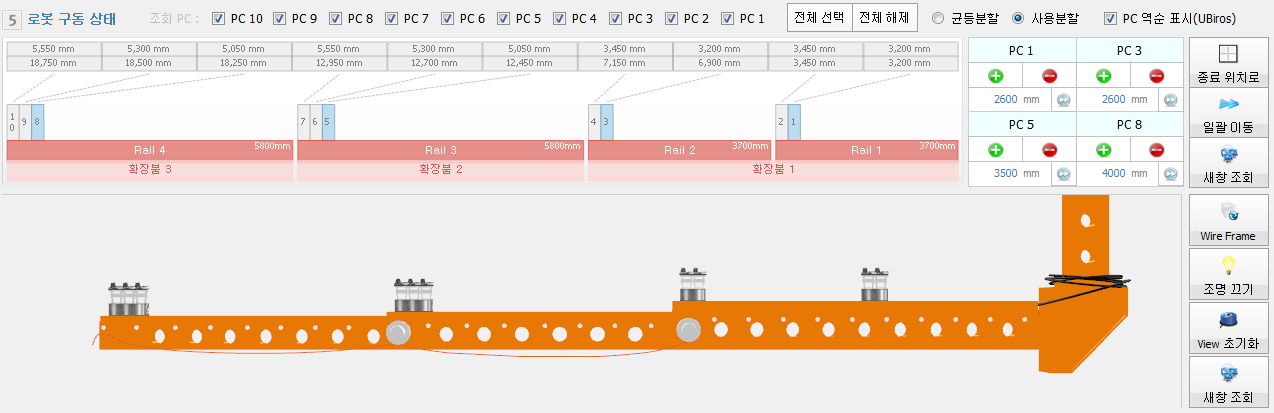
로봇 구동 상태
① PC제어
- 메인화면2창에서 PC정보 미리보기화면을 설정합니다.
- 체크한 PC만 화면에 표시됩니다. 
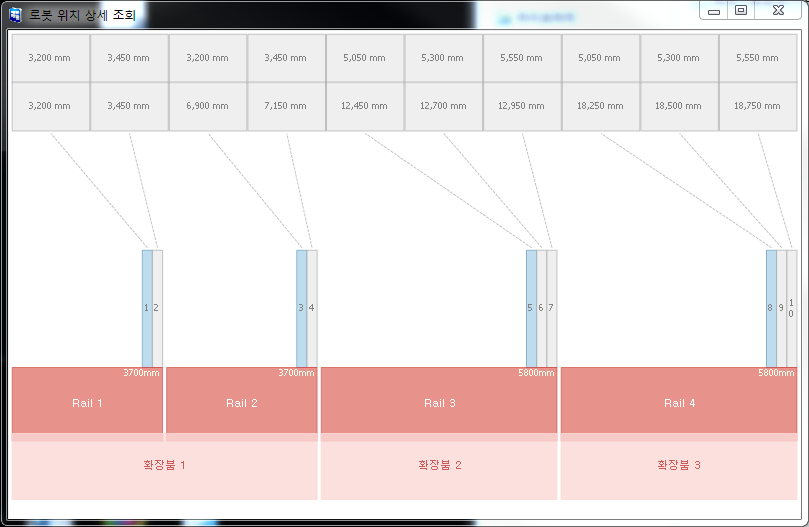
② 로봇 위치 2D View
- 로봇의 위치를 2D로 표현합니다.(실시간으로 로봇 위치 반영)

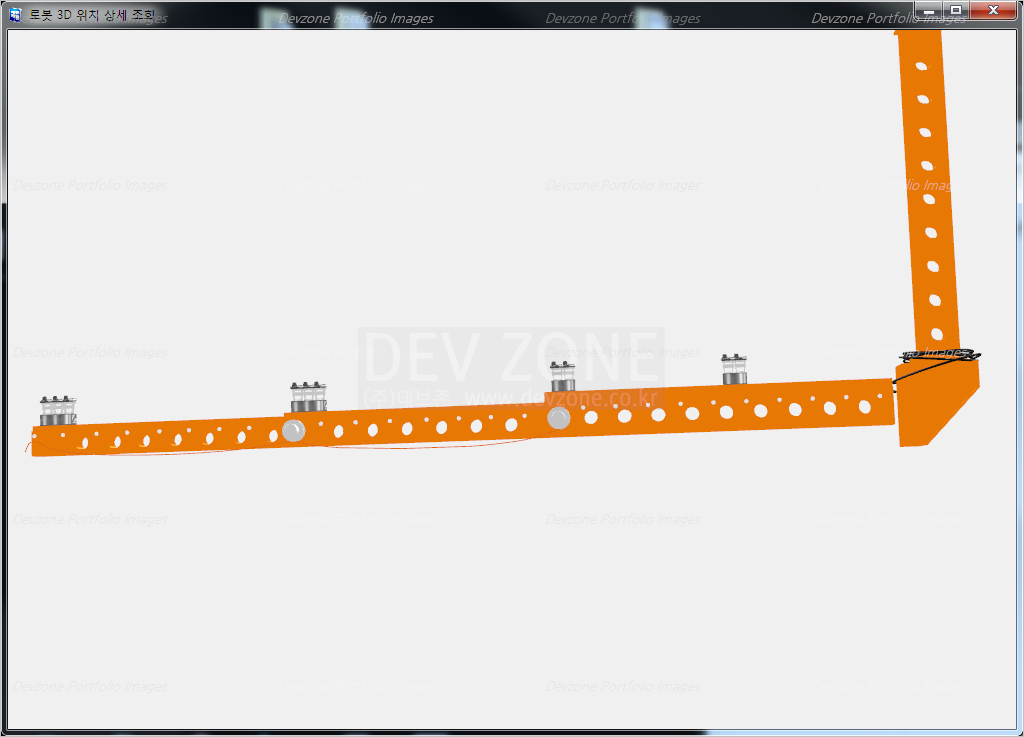
③ 로봇 위치 3D View
- 로봇 위치를 3D로 표현 합니다.(실시간으로 로봇 위치 반영)
- 마우스 오른쪽버튼을 누른상태에 드래그시(확대/축소) , 마우스 왼쪽버튼을 누른상태에 드래그시(방향전환)

- 로봇 위치 3D VIEW 조명을 끕니다.
- 초기 View 위치로 화면을 이동시킵니다.
- 로봇 위치 3D View를 새창으로 봅니다.

④ 로봇 이동
- 각 로봇별로 수치를 입력하여 이동시킵니다.
- + , - 버튼은 로봇의 위치를 좌우로 세밀하게 이동시킵니다.
- 종료위치로 : 작업 종료시 종료위치로 일괄 이동 시킵니다.
- 새 창 조회 : 새 창으로 로봇 위치 2D를 봅니다.
- 일괄이동 : 각 로봇에 입력된 수치로 일괄 이동합니다. 
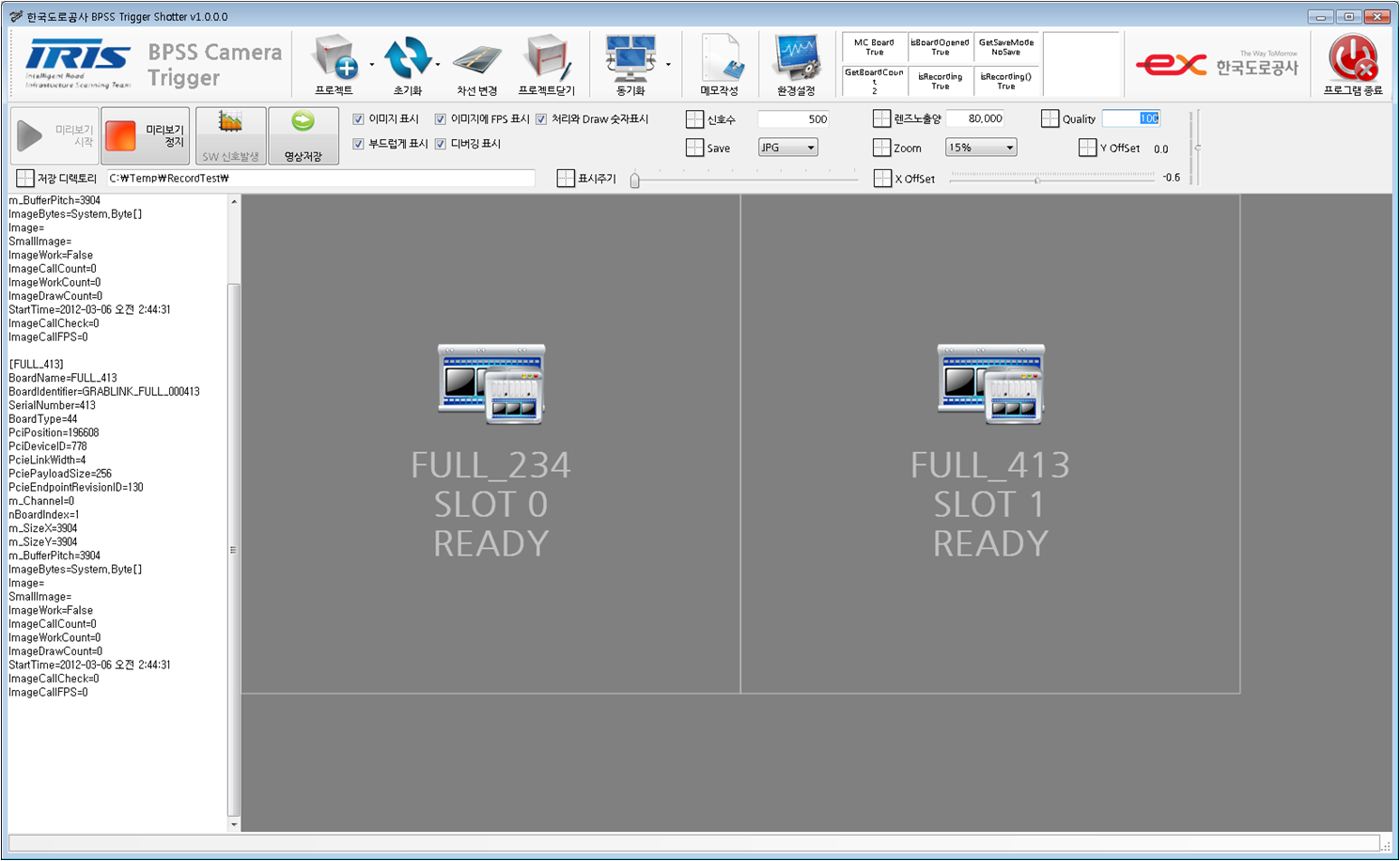
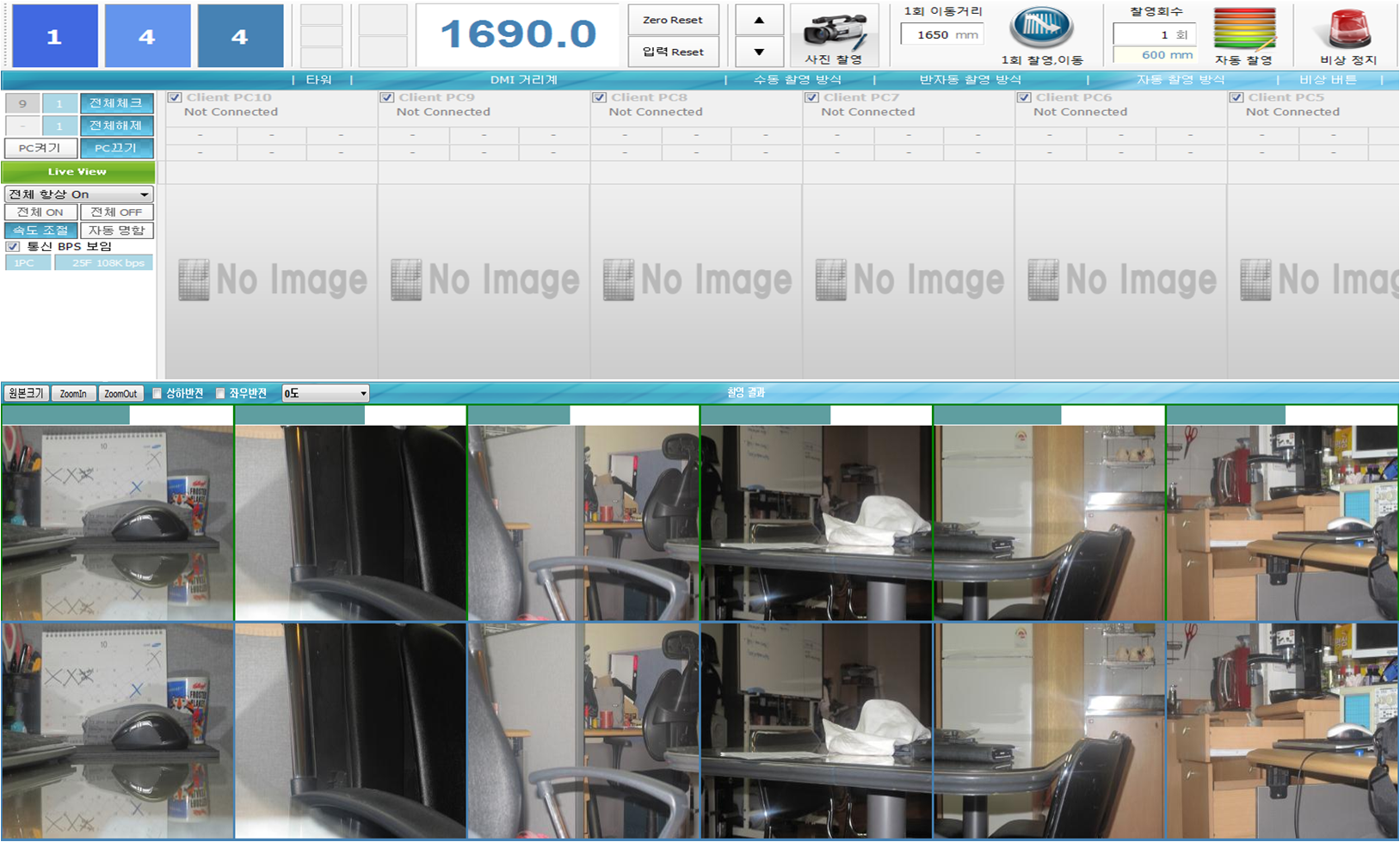
1-2 메인 화면 2 - 카메라 및 차량 이동을 제어합니다. 
촬영 이미지 상태 
① 시그널 타워 상태를 이미지로 표시합니다.
② 찰영에 사용할 PC의 대수를 표시합니다.
③ 현재관리구간에서 전체 행의 수를 표시합니다.
④ 현재구간의 전체 이미지 수를 표시합니다.
※ 해당 영역에 마우스를 올리면 설명이 나옵니다. DMI 상태 
① 저속, 고속이동시 방향을 색상으로 표시합니다.
② 현재 DMI 위치를 화면에 표시합니다.
③ 저속으로 차량을 앞뒤로 이동합니다.(마우스를 누르고 있는 동안만)
④ 고속으로 차량을 앞뒤로 이동합니다.(마우스를 누르고 있는 동안만)
⑤ Zero Reset(0으로 DMI를 초기화 시킵니다.) / 입력 Reset(임의값으로 DMI값을 입력합니다.) - 수치 입력 후 적용을 클릭합니다. 
촬영 
① 사진 촬영 : 선택된 PC에 사진을 촬영 명령을 보냅니다.
② 거리만큼 이동 : 입력된 거리만큼 차량이 이동합니다.(+는 앞으로 / -는 뒤로)
③ 1회찰영,이동 : 입력된 거리만큼 이동 후 촬영을 합니다.
④ 자동 찰영 : 1회 이동 후 촬영을 횟수만큼 반복하여 진행합니다.
⑤ 비상정지 : 차량이 이동 중이거나 자동 촬영 시 정지합니다. 설정 - 전체 체크 : 전체 PC를 체크합니다.
- 전체 해제 : 전체 PC를 해제합니다.
- PC제어 : 클릭하여 전체PC를 제어합니다.
- 카메라 : 전체PC의 카메라를 제어합니다.
- Live View on / off : 전체를 On 또는 Off 합니다.
- 속도조절 : Live View On 프레임 상태를 조절합니다.
- 통신BPS 보임 : 각 PC Live View 프레임 상태를 조절합니다. 
- 현재 PC 연결 상태 표시 
① OFF된 PC수입니다.
② ON된 PC수입니다.(네트워크에 연결된 PC수 기준)
③ 오류PC개수입니다.(카메라연결이 안된 PC)
④ 사용가능한PC개수입니다. - 속도조절 클릭 시
- 무선 네트워크 환경이기 때문에 속도가 빠르면 사진 다운로드속도와 카메라 제어속도에 영향을 미칠 수 있으므로, 속도를
낮게 잡거나 촬영 진행 중에는 LiveView Off 하고 작업하는 것을 권장합니다. 
PC 작업창
- 클라이언트 PC명 , IP주소 , 프로그램 버전 표시
- 네트워크 상태, 카메라상태, LiveView상태 , 레이저상태 표시
- 해당 PC에 마우스 오른쪽 버튼 클릭시 다음과 같은 메뉴를 통해 설정 할 수 있습니다. 

① 선택된 PC의 제어 관련 명령을 수행합니다.
② 선택된 PC의 카메라 설정을 수행합니다.
③ PC 및 카메라 설정
* 클라이언트 PC 설정

- 현재 선택된 PC 정보를 볼 수 있습니다.
- Log 파일을 통하여 저장 및 보이기를 설정합니다.(디버기용)
- Log 파일이 용량이 클 경우 삭제할수있음.
- 파일전송대기는 사진찰영하여 이미지 다운시 대기시간을 설정합니다.
- 카메라 인식은 카메라가 연결되지 않을 경우 주기적으로 지정된 시간만큼 연결 시도합니다.
- 레이저 거리계 사용시 포트 및 속도 갱신주기를 설정 할 수 있습니다.
- 팬 / 틸트 연결을 설정합니다.(현재는 팬/틸트 고장으로 구현이 불가)
- 해당PC가 로봇에 연결되었을 경우 설정합니다.
* 클라이언트 카메라 설정
- 선택된 카메라를 설정합니다.

1) 현재 적용된 카메라 설정값을 연결된 전쳬 PC의 카메라 설정값에 저장합니다. 
- 해당 PC를 찰영하여 다운로드 받아서 미리보기 방식으로 사진을 조회 할 수 있습니다.
- 현재 PC에서 이미지파일을 받고 있을 경우에는 그 이미지들이 전부 다운된 다음에 미리보기 파일을 다운로드 받습니다.
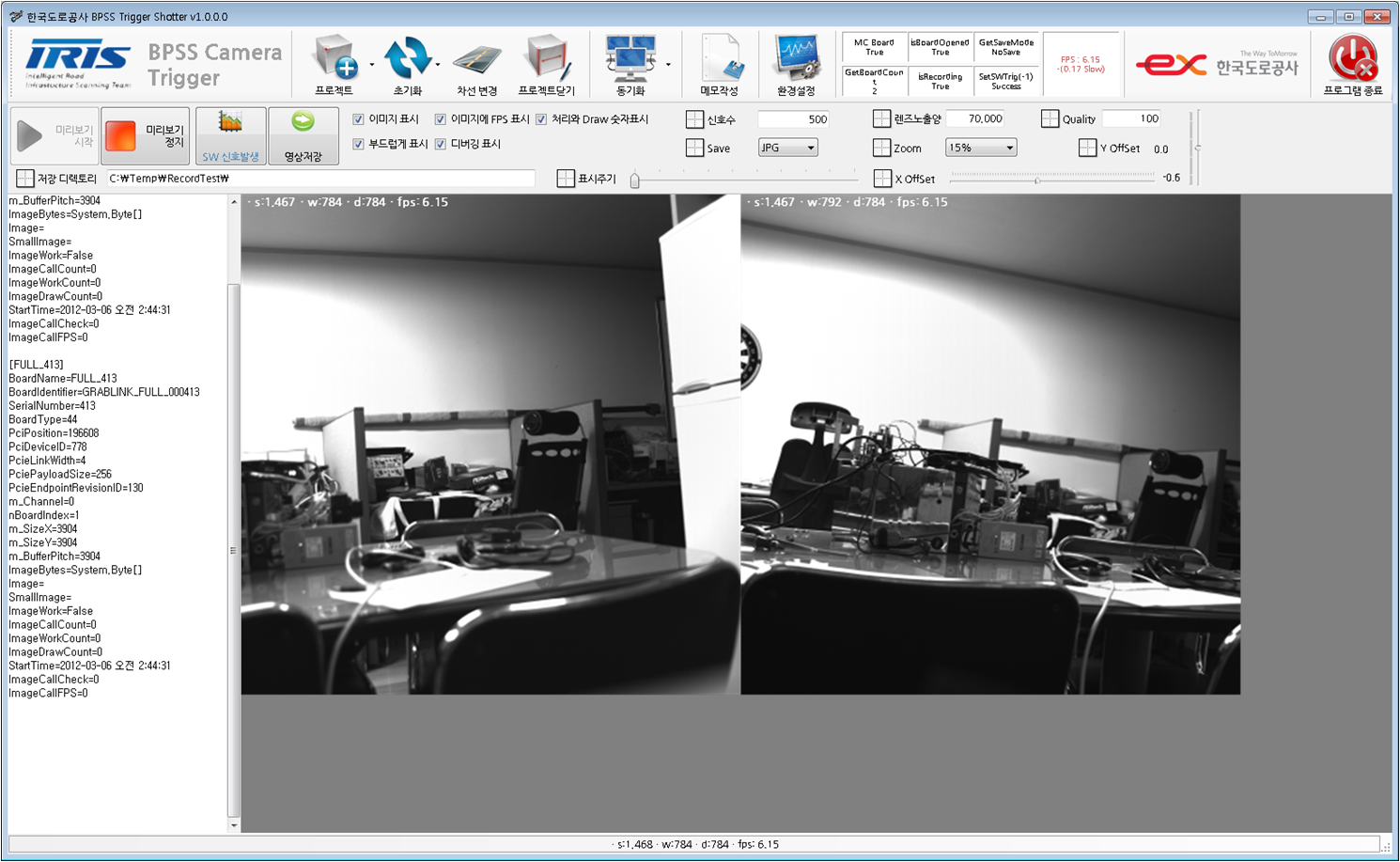
미리보기 창
- 원본크기 : 사진목록을 원본 미리보기 비율로 유지합니다.
- Zoomin / ZoomOut : 확대 및 축소합니다.
- 상하 / 좌우 반전 기능추가
- 해당 각도로 이미지를 회전시킵니다.
- 좌우길게표시 체크시(좌우방향으로) , 미체크시(위에서아래방향으로)
- Grid Border : 각 이미지의 테두리를 표시합니다.
- Row 번호보기 : 체크시 해당 이미지의 ROW번호를 표시합니다.
- 해당 이미지를 더블클릭시 원본이미지로 볼 수 있습니다.
- 해당 이미지에 오른쪽버튼 클릭시 원본 이미지를 보거나 삭제할 수 있습니다. 
1-3 차량 - UBIROS 차량을 이용하여 운행하며 도로의 균열상태를 측정한다. 



| 


















댓글 없음:
댓글 쓰기